Keyi WangI’m currently a founding research engineer at a stealth robotics startup. I just obtained my Master's degree in ECE from UC San Diego, where I was advised by Prof. Xiaolong Wang and my research focused on dexterous hand manipulation. Prior to master, I receieved my bachelor’s degree in Engineering Mechanics from Zhejiang University, where I was advised by Prof. Shaoxing Qu and Prof. Jie Wang. Email / GitHub / Google Scholar / LinkedIn |

|
ResearchMy recent research interests lie in robot learning and dexterous hand manipulation. During my undergrad, I also worked on modeling and designing intelligent materials. |
|
Dex1b: Learning with 1B Demonstrations for Dexterous ManipulationJianglong Ye*, Keyi Wang*, Chengjing Yuan, Ruihan Yang, Yiquan Li, Jiyue Zhu, Yuzhe Qin, Xueyan Zou, Xiaolong Wang Robotics: Science and Systems (RSS), 2025 arxiv / website / Dex1B is a large-scale, diverse, and high-quality demonstration dataset generated using generative models. It contains one billion demonstrations for two fundamental tasks: grasping🖐️ and articulation💻. |
|
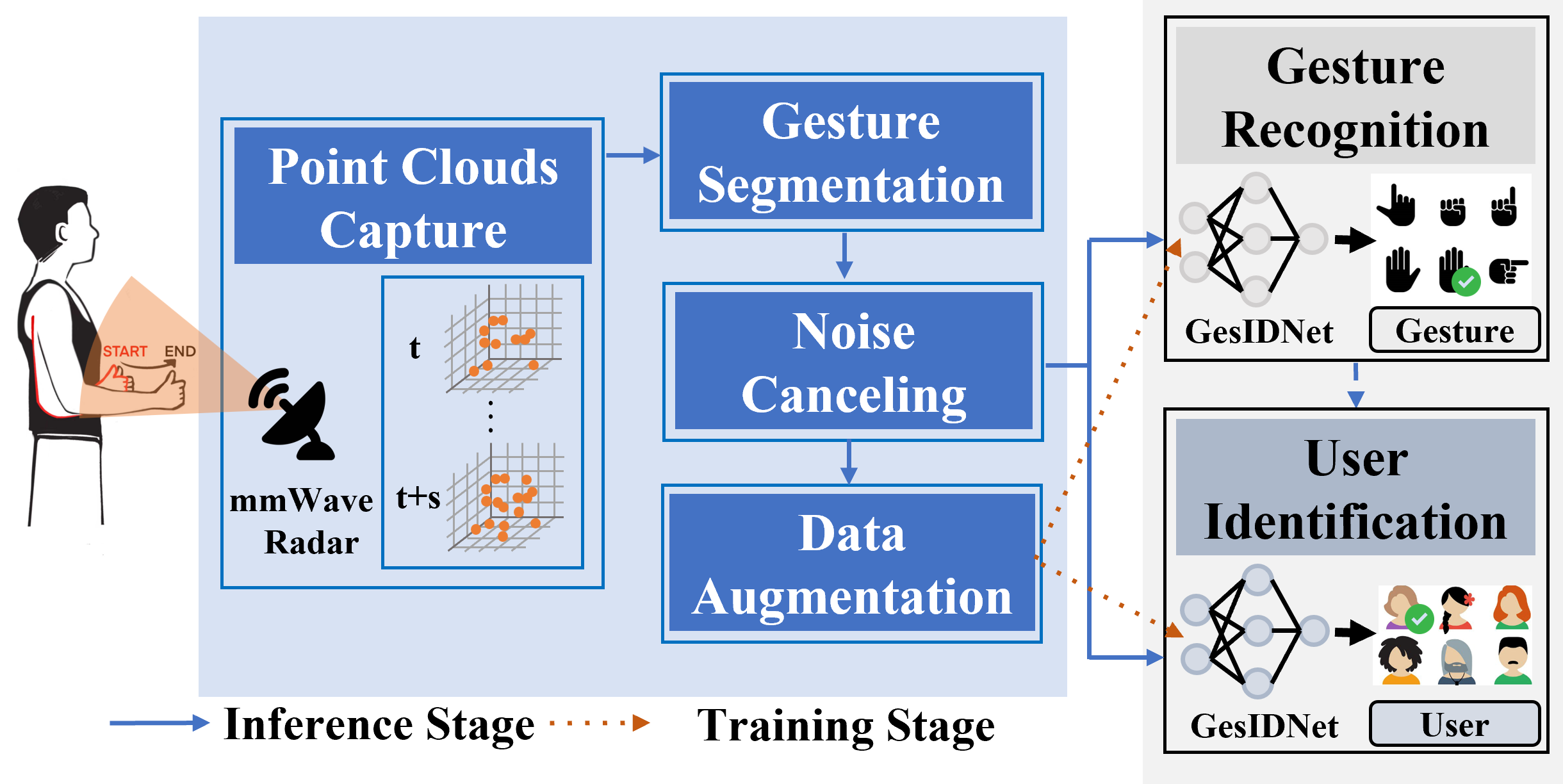
GesturePrint: Enabling User Identification for mmWave-Based Gesture Recognition SystemsLilin Xu, Keyi Wang, Chaojie Gu, Xiuzhen Guo, Shibo He, Jiming Chen 2024 IEEE 44th International Conference on Distributed Computing Systems (ICDCS), 2024 website / GesturePrint, a method to achieve gesture recognition and gesture-based user identification using a commodity mmWave radar sensor. |
|
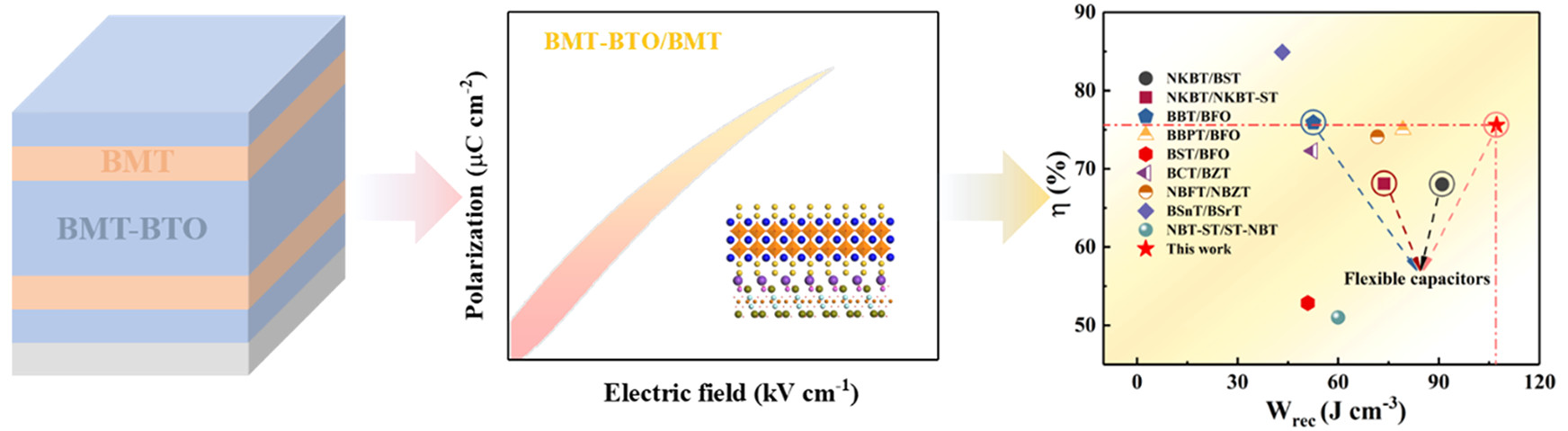
Interlayer Coupling Enhanced Energy Storage Performance in a Flexible BMT-BTO/BMT Multilayer Ferroelectric Film CapacitorChengwen Bin*, Xu Hou*, Keyi Wang, Luocheng Liao, Yadan Xie, Han Yang, Hua Wei, Yunya Liu, Jie Wang ACS Applied Materials & Interfaces, 2022 website / I worked on the simulation side of this project. 1. Derived Phase-Field Simulation Equations of Ferroelectric Materials and their Weak Finite Element Solution Forms. 2. Developed a Comsol program to construct a physical field based on the Weak Finite Element Solution and perform simulation calculations to obtain the time-varying polarization value of multilayer ferroelectric thin film models. |
ProjectsThese include unpublished research work. |
|
High sensitivity Hygrogel Tactile Sensorproject supported by the National Undergraduate Innovation and Entrepreneurship Training Program (China) Developed digital light processing (DLP) 3D printing technique to fabricate functional 3D hygrogel sensors that seamlessly connect millimeter-scale resolution with centimeter-scale sensors. |
|
Design and source code from Jon Barron's website |